
Cars are undoubtedly becoming smarter and in-car technology is getting better. One aspect receiving significant attention is the smart car’s ability to communicate with occupants as well as with its surroundings.
Thus far, communication in cars has primarily focused on the occupants by serving them consumable content from remote servers or the cloud. This content delivery is commonly referred to as infotainment — where the occupants are served with information related to their journey (such as maps, weather, attractions, places of interest, congested roads, and nearby accidents) or with entertainment options (such as satellite radio, music, internet connectivity, and social networking applications). Car connectivity also enables services such as emergency communication in the event of an accident or a breakdown of the car. The car’s on-board diagnostics (OBD)-II port is a rich avenue for procuring messages on the performance and health of the car, and providing them to the driver or a service technician for improved troubleshooting.
Over the past several years, inter-car communication has received a lot of interest, especially in the context of safety, where it has been subject to a significant amount of research. It is now fairly well-recognized that inter-car communication could potentially help in the reduction of traffic-related fatalities, of which over 37,000 occurred on US roads in 2016, according to data from the U.S. Department of Transportation’s National Highway Traffic Safety Administration.
Building upon this foundation of inter-car communication, various use cases related to communication between the car and its surroundings — including pedestrians and cyclists — are being evaluated. With the rapid advancement of connectivity in cars — more so in recent years — it is useful to have a ready summary of the various kinds of communication technologies available to automobiles.
Systems for connected car communication
Communication in connected cars (used interchangeably with “connected vehicles” here) can be categorized in terms of transmitters and receivers as follows:
1) Vehicle-to-Environment (V2E)
- Vehicle-to-Vehicle (V2V)
- Vehicle-to-Infrastructure (V2I)
- Vehicle-to-Pedestrian (V2P)
2) Vehicle-to-User (V2U)
3) Vehicle-to-Network (V2N)
These systems for communication in cars are captured in Figure 1:
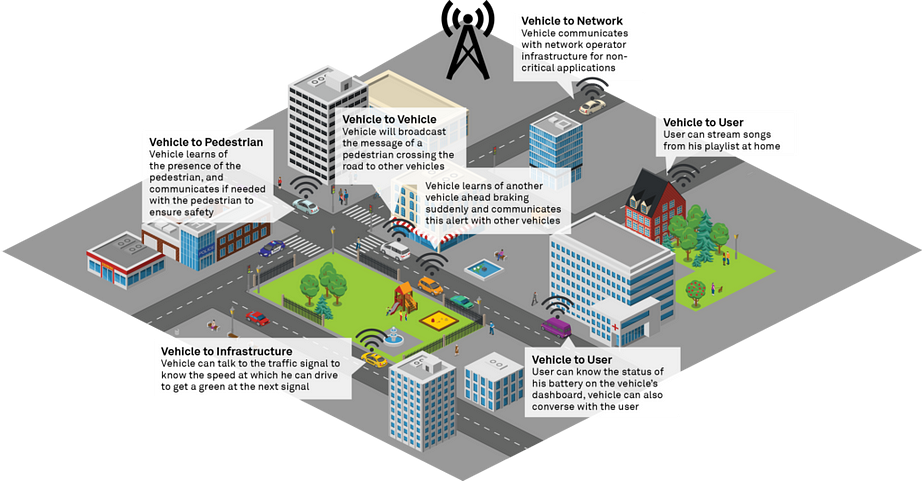
Figure 1: Various communication systems for connected cars.
Vehicle to Environment (V2E) consists of communication between the connected car and its dynamically changing environment (which includes other vehicles, cyclists, and pedestrians) as well as communication between the car and its static environment (such as traffic signals, tolling systems, electronic parking, and roads). Some tier-one automotive companies and technology start-ups have shown active interest in V2E, especially regarding safety use cases, and have been leading at the forefront of innovation.
Vehicle to User (V2U) refers to communication between the car and its occupants, including the driver. This communication is related to infotainment and personalization of the travel experience. Several auto OEMs are focused on V2U with the primary goal of creating an experience for the occupant of the car that extends the human’s digital experience from the home and workplace into the car.
The major difference between V2E and V2U is in the regulatory and network constraints. V2E communication such as V2V and V2I that focuses on alerts or safety-related messages is governed by a tighter regulatory framework compared to V2U — as any slipup can have serious repercussions on public safety. Messages related to safety cannot be dropped, and so that puts additional constraints on the communication protocol and the network itself. For the same reason, the network needs to have low latency and a minimum delay. Unlike V2E, V2U is not intended to address time-critical applications, as most applications are meant for infotainment and convenience (except perhaps for emergency calls from the car). Hence, regulatory and network requirements are not as critical for V2U as in V2E.
Vehicle-to-Network (V2N) represents the connectivity between the car and a network operator providing access to the car, perhaps on multiple frequencies. This communication can provide non-critical but useful information (such as on road closures and congestion) and cloud-based services that augment the experience of the occupants, while also serving as a hotspot for internet connectivity.
Connected vehicles and safety
Self-driving cars are an innovation of growing importance because of their purported ability to minimize accidents. An important classification of communication is needed here: Line-of-sight (LOS) and Non Line-of-Sight (NLOS) communications. Today’s self-driving cars tend to focus more on the LOS communications. Each self-driving car prototype is equipped with a combination of cameras, radars, LIDARs, and ultrasonic sensors — all of which rely on LOS communication to comprehend the environment and make decisions that ensure a safe driving experience. In spite of these technologies, an object that suddenly appears in the view of a self-driving car — or a car approaching an unmanned intersection “unseen” by a self-driving car — can potentially lead to a collision. For such situations, NLOS communication provides a necessary and a useful redundant layer of safety for the car. V2E falls in the class of NLOS communications that can potentially enhance the safety of self-driving cars. Therefore, for an autonomous car to augment its LOS safety capabilities, it becomes necessary for it to also have V2E communication capability.
Status of technologies used for V2E
Let us take a closer look at the technologies that will form the backbone of the connected vehicle ecosystem, specifically related to V2E: How is this communication enabled? What is the technologies’ status in terms of ecosystem readiness and the likelihood of mass adoption?
V2E addresses safety applications that are crucial for rapid, robust, and timely performance: any delay in message delivery could lead to a potentially fatal collision. Over the years — and with significant transportation stakeholder input — the SAE Dedicated Short Range Communication (DSRC) Technical Committee has developed a data dictionary, SAE J27355, that defines 16 (and perhaps more) specific V2X messages. Safety applications include warnings for red light violations, curve speeds, reduced speed/work zones, emergency electronic brake lights, forward collisions, and so on. All of these warnings are picked by the car closest to their place of occurrence, and then further propagated to the cars around it. For the propagation of such messages, the following communication protocols are used:
- DSRC/ IEEE802.11p
- LTE-V2X (will likely evolve to 5G in the future)
Dedicated Short Range Communication (DSRC)/ IEEE802.11p
Being a part of the specifications for implementing Wireless Local Area Networks (WLAN), DSRC for applications related to wireless access in vehicular environments (WAVE) relies on the IEEE 802.11p, which is an amendment to the IEEE 802.11 standard. To support the DSRC communication protocol, 75MHz of spectrum has been allocated in the 5.9GHz band for use by ITS. A key feature of 802.11p is its ability to communicate for relative vehicle speeds of 250km/h. Several field trials of this technology have been completed, with a notable large-scale pilot funded by US Department of Transportation (DOT) in Wyoming, Tampa and New York City that included over 10,000 vehicles. NXP has been actively pursuing the DSRC 802.11p technology path for V2X applications.
DSRC is based on the 802.11 family of Carrier Sense Multiple Access with Collision Avoidance (CSMA-CA) protocol. In this protocol, the device listens to the channel before sending a packet, and any packet is sent only if the channel is clear. This results in a delay due to the time spent waiting for channel availability. In addition, collisions between messages from two or more devices may occur when they transmit at overlapping times. So a DSRC network does not always fulfill the requirement of a safety-related communication where no message is dropped. Additionally, the range that they support is typically 150–300m, implying that the vehicle will not pick up the message unless it is within this range. For safety communication with vehicles, DSRC requires fixed infrastructure called Road Side Units (RSUs). Installing these RSUs on road networks is therefore a major need for the widespread successful adoption of DSRC/IEEE 802.11p.
LTE-V2X
Long Term Evolution — Vehicle to X (LTE-V2X) communication subsumes V2V, V2I, V2P and V2N, so the types of messages and services enabled will likely transcend even the combinations available in SAE J2735. In the presence of a network, LTE-V2X can leverage years of innovation in the cellular domain providing a compelling alternative to DSRC-based communications. No extra infrastructure is needed, as LTE-V2X can use existing cellular infrastructure. The benefit of LTE-V2X is that, in the absence of a network connection, it relies on the same V2V communication frequency for communication of safety messages. Qualcomm has been pursuing this work in the context of Cellular V2X (C-V2X) technologies for several years now.
LTE-V2X works on synchronous communication with high clock synchronization requirements, resulting in the need for better or more expensive hardware. The clock synchronization ensures that no messages are dropped, and digital messages are captured on the edge or level of a clock. Hence, synchronization (frequency and phase match) between the message and the clock is needed for messages to always be captured. However, this sync is generally established using Global Navigation Satellite System (GNSS) signals, which may not be available everywhere (for example, inside tunnels and underground parking lots). As DSRC 802.11p requires deployment of RSUs, and LTE-V2X necessitates clock synchronization hardware, this points to the likelihood that either deployment will have associated costs, which will have to be borne by either the end-user or the government.
LTE-V2X supports relative speeds of 500 km/h or more. Furthermore, the range for LTE-V2X is greater than 450m, which results in the driver having a longer reaction time than in 802.11p communications. The planned evolution of LTE-V2X into 5G will bring major expected improvements in terms of latency and bandwidth.
5G
5G is poised to bring a range of benefits to enable a connected car ecosystem, specifically: bandwidths that support large data transfer, native support for peer-to-peer communication, improved reliability in transmission of messages, extremely low latency, and failure tolerance features. 5G will serve as an enabler for a whole new set of use cases to augment safety in vehicular transportation that will leverage the ability of increased data transfer. These include the sharing of sensor data among cars, improved positioning using wideband support, and sharing of high definition maps for autonomous driving use cases. A cross-industry alliance of leading companies — consisting of major automotive players like Audi, BMW and Daimler, with telecom services and equipment providers Ericsson, Huawei and Nokia, and semiconductor companies Intel and Qualcommm — is joining forces to evolve, test and promote 5G communications for connected cars. By 2020, this upcoming network will support 212 billion connected sensors and 50 billion connected devices.
Looking ahead: A Hybrid approach
Given the pros and cons of each communication protocol for V2E communication, a combination of protocols — a hybrid approach — might ultimately be an ideal model for vehicular communication. A hybrid approach can combine the advantages of each technology to result in a more robust solution.
The ideal solution going forward will likely be: combining the benefits of the cellular network that provides longer range connectivity between vehicles and between vehicles and the cloud; gradual deployment of RSUs needed for DSRC communication for shorter-range, peer-to-peer communication between vehicles; and the adoption of LTE-V2X as well as evolution of 5G for connectivity between cars.
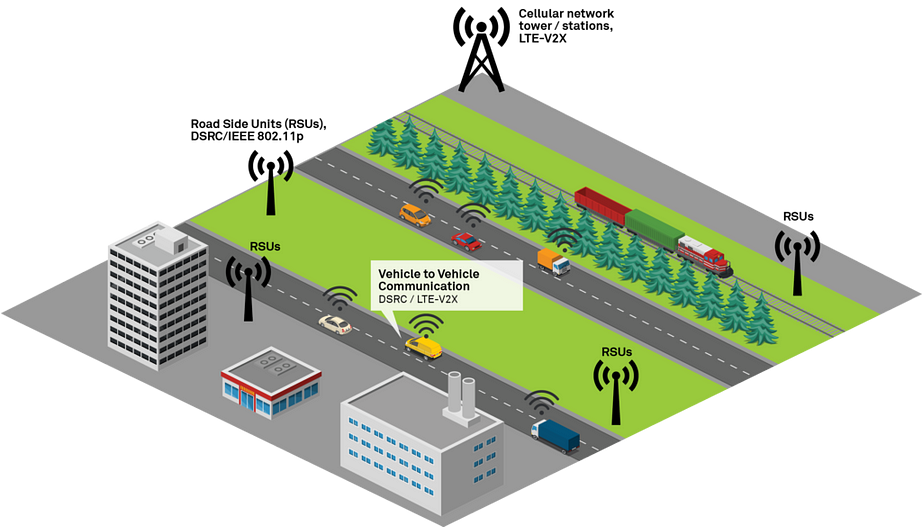
Figure 2: A hybrid approach for car-to-everything communication.
