› Forums › IoTStack › News (IoTStack) › Edge2AI Autonomous Car: Collecting Data on Small-scale Smart Car and Preparing Data Pipeline (1 of 3)
- This topic has 1 voice and 0 replies.
-
AuthorPosts
-
-
October 10, 2019 at 3:39 pm #35285
#News(IoTStack) [ via IoTGroup ]
Headings…
Edge2AI Autonomous Car: Collecting Data on Small-scale Smart Car and Prepar
Intro
Cloudera Edge Management Overview
ROS Embedded Application
Enabling Edge Device to transport data to the cloud
Building an Edge Data Pipeline
ConclusionAuto extracted Text……
As you can see above, we send the data collected from the car to an instance of Hadoop Distributed File System (HDFS) in the cloud and use CDSW to build and train a Keras model on top of TensorFlow.
A Data Engineer working on a data pipeline may be required to play the role of an Embedded Systems Engineer to handle edge computing when required to collect sensor data from an edge device, Cloudera Edge Management (CEM) can be used to create a data pipeline from the edge to the cloud.
With it you can manage and monitor edge agents to collect data and store it back into Cloudera Distribution Hadoop (CDH).
CEM makes it possible to deploy intelligence back to the edge agents to make the process of data collection even more efficient, for example, a smart car which has received an improved model through CEM can make better decisions which enable it to drive autonomously for longer periods of time; thus, collecting more data that can further improve the model.
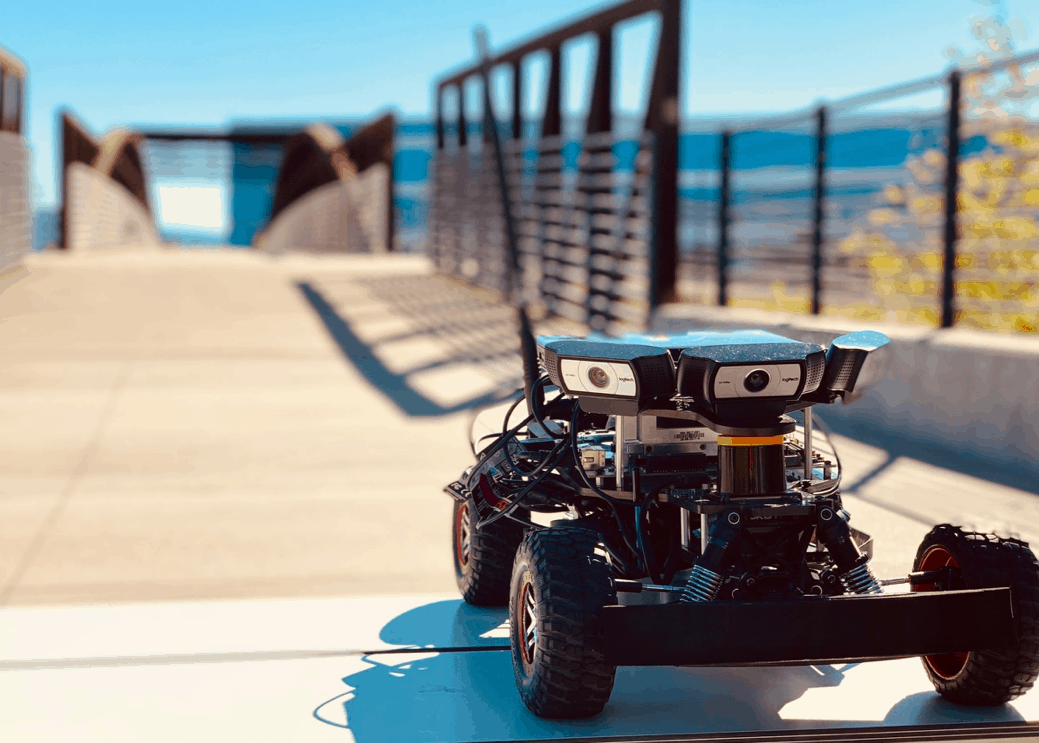
ROS allows us to communicate with all the sensors connected to our Jetson TX2 board and combine the collected data before sending it to EFM.
Data is collected when a user manually drives the car around our custom track and starts recording data, the ROS embedded application then stores the data onto the Jetson TX2’s local file system.
In order to enable the transport data to the cloud, we installed MiNiFi on the car.
On the cloud instance that is running CEM, one can choose which MiNiFi agent(s) they want to build the data flow for by selecting the agent’s class, note that the class can be associated with one or more MiNiFi agents.
So, once the data flow is finished being built, the user can click on the options dropdown, then press publish, so the data flow is deployed on the edge device where the MiNiFi agent is installed.
EFM UI was used to build a data flow for MiNiFi C++ agent running on the Jetson TX2 and stewart data from where it was collected and transmit it to the cloud
Read More..
AutoTextExtraction by Working BoT using SmartNews 1.0299999999 Build 26 Aug 2019
-
-
AuthorPosts
- You must be logged in to reply to this topic.
